【Adv.Mater.】光声导航+磁控微机器人:开启精准药物递送新时代的3项关键突破
文章标题:Optoacoustic‐Guided Magnetic Microrobot Platform for Precision Drug Delivery 通讯作者:Xuewen Wang
文章链接:https://doi.org/10.1002/adma.202511870
文章概要
在精准医疗日益发展的背景下,如何将药物高效、准确地输送至病灶区域成为生物医学工程的重要挑战。由Xuewen Wang教授团队发表于《Advanced Materials》的研究“Optoacoustic‐Guided Magnetic Microrobot Platform for Precision Drug Delivery”提出了一种融合光声成像与磁控导航的新型微机器人平台,为精准药物递送提供了突破性解决方案 advanced.onlinelibrary.wiley.com。
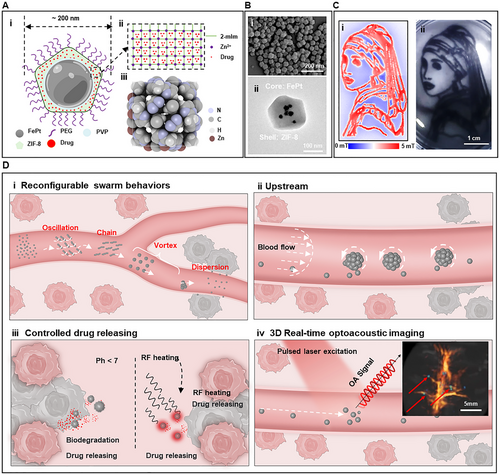
本研究的核心创新在于构建了一种具备光声可视化能力的磁控微机器人(OMMs),并实现了在活体内的实时定位与导航。该平台融合了三项关键技术突破:
一、微机器人结构设计与功能集成
研究团队设计的OMMs由磁性纳米颗粒(Fe₃O₄)与光声染料(ICG)复合构成,外层包裹有生物相容性聚合物。该结构不仅赋予微机器人良好的磁响应性,还具备强烈的近红外吸收能力,可在光声成像下清晰呈现。微机器人尺寸约为几十微米,适合在血管或组织间穿行,且具备药物负载与释放能力。
二、光声成像实现实时定位与导航
光声成像技术结合了光学与超声的优势,能够在组织深处提供高分辨率的成像。研究中,OMMs在近红外激光照射下产生光声信号,成功实现了在小鼠体内的实时追踪。相比传统荧光成像,光声成像具有更深的穿透深度与更高的空间分辨率,使得微机器人在复杂生理环境中仍能被精准定位。
三、磁控导航实现定向递送与靶向释放
通过外部磁场控制,OMMs可在体内实现定向运动。研究人员利用磁场梯度引导微机器人穿越血管网络,最终抵达目标区域。在到达病灶后,微机器人可通过环境刺激(如pH变化或温度)触发药物释放,实现靶向治疗。实验中,OMMs成功将药物递送至肿瘤区域,并显著提高了治疗效果。
实验验证与生物安全性评估
研究在小鼠模型中进行了系统验证,结果显示OMMs在体内具有良好的稳定性与生物相容性。光声成像清晰呈现微机器人运动轨迹,磁控导航实现了高效的靶向递送。组织学分析未发现明显毒性反应,表明该平台具备临床转化潜力。
应用前景与挑战
该研究展示了光声-磁控微机器人在精准药物递送领域的巨大潜力,尤其适用于肿瘤治疗、炎症定位及神经系统疾病等场景。未来挑战包括:
- 提高微机器人在复杂血流环境中的导航精度;
- 优化药物释放机制以适应不同病理条件;
- 推动该技术在大型动物模型及临床试验中的应用。
总结
本研究首次将光声成像与磁控导航深度融合,构建了具备实时可视化与精准控制能力的微机器人平台。其在活体内的成功应用标志着微尺度药物递送技术迈入新阶段,为未来个性化治疗与智能医疗提供了坚实基础。